Artikel Installation av armering med industrirobotar
Simuleringar med installation av armeringsjärn fungerar som tänkt.
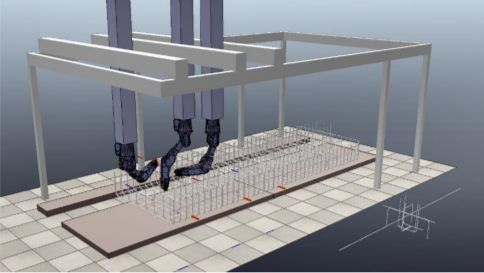
Kan man utveckla en automatisk armeringsstation som med utgångspunkt från en digital 3D-modell av armeringen i den permanenta konstruktionen, på arbetsplatsen tillverkar en armeringsenhet?
Det här projektet har arbetat med det. De simuleringar med installation av armeringsjärn i en armeringskorg med successivt allt
fler armeringsjärn installerade visar att det valda konceptet, under förutsättning av ideala
förhållanden, fungerar som tänkt.
Arbetet har genomförts i flera steg. Den första delen bestod av att med hjälp av ABB:s
programvara RobotStudio simulera sammansättningen av en armeringskorg. Armeringskorgen hade tidigare 3D-modellerats av Skanska för byggandet av bron för Slammertorpsvägen över Mälarbanan. Nästa steg i utvecklingsarbetet bestod i verktygsutveckling och byggandet av en demonstrator
i laboratoriemiljö.
Projektet har nu kommit till en punkt där ett ”proof of concept” har skapats. Den ursprungliga
frågeställningen om huruvida det är möjligt att montera armering med hjälp av industrirobotar
har kunnat besvaras jakande. Det har också visats att det är möjligt att göra detta med utgångspunkt från en digital 3D-modell av den permanenta konstruktionen, där så kallad banplanering används för att skapa de robotbanor som krävs för att montera armeringen. Nästa steg i utvecklingsarbetet är att vidareutveckla och bygga en prototyp av stationen i full
skala.
Syfte
Ett syfte med det här projektet var att vidareutveckla det proof of concept gällande banplanering som beskrivs i avsnittet ovan. Ett annat syfte är att, i en nerskalad fysisk laboratorie-modell, demonstrera att det är möjligt att tillverka fullständiga armeringskorgar med robotar, baserat på instruktioner från en konventionell 3D-armeringsprojektering.Målsättningen var att i ett kommande projekt använda erhållen kunskap, inklusive utveckling av fler frihetsgrader för robotarna samt nya verktyg, från demonstratorn till att projektera och bygga en fullskalemodell, en prototyp.
Bakgrund
Skanska har sedan 2014 arbetat med frågor som rör automation inom byggbranschen. Arbetet har varit fokuserat på installation av armering med hjälp av industrirobotar men principerna skulle även kunna tillämpas på andra byggaktiviteter. Installation av armering utförs idag manuellt. Det är ett tungt, tids- och resurskrävande arbete.
Om arbetet istället skulle kunna utföras med hjälp av maskiner, i det här fallet industrirobotar, skulle man vinna till exempel lägre produktionskostnader, högre produktionstakt och förbättrad arbetsmiljö. Skanska har samarbetat med ABB och Robotdalen. Konkret har arbetet handlat om att utveckla en automatisk armeringsstation som med utgångspunkt från en digital 3D-modell av armeringen i den permanenta konstruktionen, på arbetsplatsen tillverkar en armeringsenhet.
Kontakt
- Lars Pettersson Skanska Lars.g.pettersson@skanska.se